Note
Go to the end to download the full example code.
Mean and median comparison¶
A comparison between Euclidean and Riemannian means [1], and Euclidean and Riemannian geometric medians [2], on low-dimensional synthetic datasets.
# Authors: Quentin Barthélemy
#
# License: BSD (3-clause)
import matplotlib.pyplot as plt
import numpy as np
from sklearn.datasets import make_blobs
from pyriemann.artifact_detection import Potato
from pyriemann.datasets import make_outliers
from pyriemann.utils import (
mean_euclid,
mean_riemann,
median_euclid,
median_riemann,
)
rs = np.random.RandomState(17)
Data in vector space¶
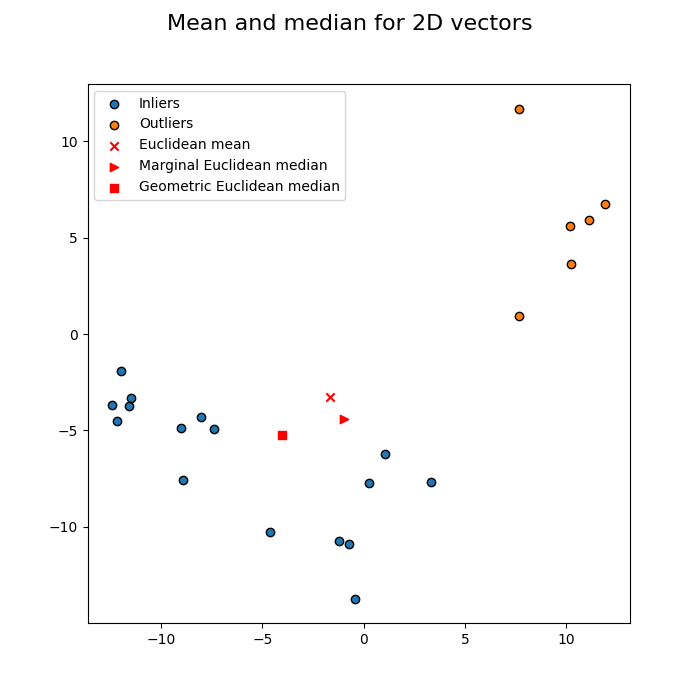
Dataset of 2D vectors, reproducing Fig 1 of reference [2].
Notice how the few outliers at the top right of the picture have forced the mean away from the points, whereas the geometric median remains centrally located.
X, y = make_blobs(
n_samples=[7, 9, 6],
n_features=2,
centers=np.array([[-1, -10], [-10, -4], [10, 5]]),
cluster_std=[2, 2, 2],
random_state=rs
)
is_inlier = (y <= 1)
C_mean = mean_euclid(X[..., np.newaxis])
C_mmed = np.median(X, axis=0)
C_gmed = median_euclid(X[..., np.newaxis])
fig, ax = plt.subplots(figsize=(7, 7))
fig.suptitle("Mean and median for 2D vectors", fontsize=16)
ax.scatter(X[is_inlier, 0], X[is_inlier, 1], c="C0", edgecolors="k",
label="Inliers")
ax.scatter(X[~is_inlier, 0], X[~is_inlier, 1], c="C1", edgecolors="k",
label="Outliers")
ax.scatter(C_mean[0], C_mean[1], c="r", marker="x", label="Euclidean mean")
ax.scatter(C_mmed[0], C_mmed[1], c="r", marker=">",
label="Marginal Euclidean median")
ax.scatter(C_gmed[0], C_gmed[1], c="r", marker="s",
label="Geometric Euclidean median")
ax.legend(loc="upper left")
plt.show()
Data in manifold of SPD matrices¶
Dataset of 2x2 SPD matrices.
A dynamic display is required if you want to rotate or zoom the 3D figure. This 3D plot can be tricky to interpret. 2x2 SPD matrices can be viewed as spatial coordinates contained in a hyper-cone [3]. In Euclidean geometry, null matrix is the center of space. In Riemannian geometry, identity matrix is the center of the unbounded and non-linear manifold [3]: due to log(.)^2 in the affine-invariant distance, an eigenvalue of 10 contributes to the distance from the identity as much as an eigenvalue 0.1.
n_channels, n_inliers, n_outliers = 2, 16, 6
Cin = 0.2 * np.eye(n_channels)
Xin = make_outliers(n_inliers, Cin, 0.5, outlier_coeff=1, random_state=rs)
Xout = make_outliers(
n_outliers, 4 * np.eye(n_channels), 0.5, outlier_coeff=1, random_state=rs)
X = np.concatenate([Xin, Xout])
C_emean = mean_euclid(X)
C_rmean = mean_riemann(X)
C_emed = median_euclid(X)
C_rmed = median_riemann(X)
fig2 = plt.figure(figsize=(7, 7))
fig2.suptitle("Means and medians for 2x2 SPD matrices", fontsize=16)
ax2 = plt.subplot(111, projection="3d")
ax2.scatter(1, 0, 1, c="k", marker="+", s=50, label="Identity")
ax2.scatter(Xin[:, 0, 0], Xin[:, 0, 1], Xin[:, 1, 1], c="C0", edgecolors="k",
label="Inliers")
ax2.scatter(Xout[:, 0, 0], Xout[:, 0, 1], Xout[:, 1, 1], c="C1",
edgecolors="k", label="Outliers")
ax2.scatter(C_emean[0, 0], C_emean[0, 1], C_emean[1, 1], c="r", marker="x",
label="Euclidean mean")
ax2.scatter(C_rmean[0, 0], C_rmean[0, 1], C_rmean[1, 1], c="m", marker="x",
label="Riemannian mean")
ax2.scatter(C_emed[0, 0], C_emed[0, 1], C_emed[1, 1], c="r", marker="s",
label="Euclidean median")
ax2.scatter(C_rmed[0, 0], C_rmed[0, 1], C_rmed[1, 1], c="m", marker="s",
label="Riemannian median")
ax2.legend(loc="center left", bbox_to_anchor=(0.7, 0.6))
plt.show()
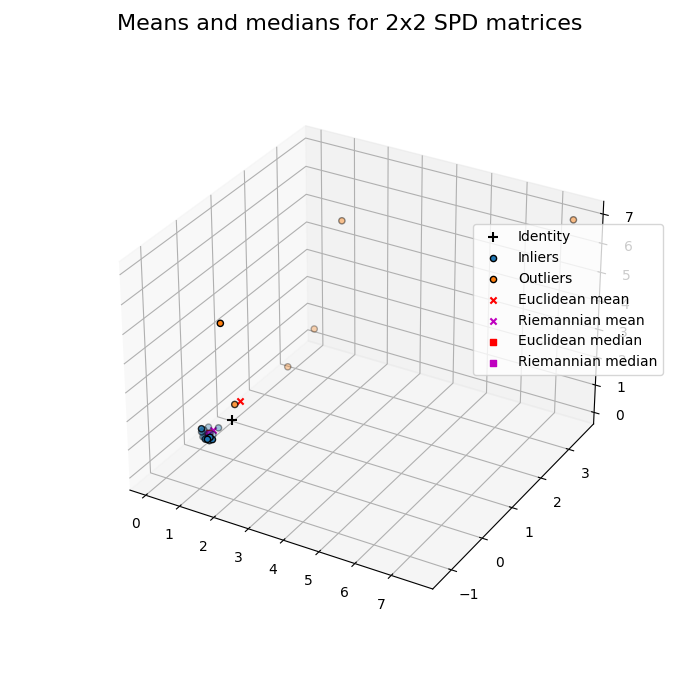
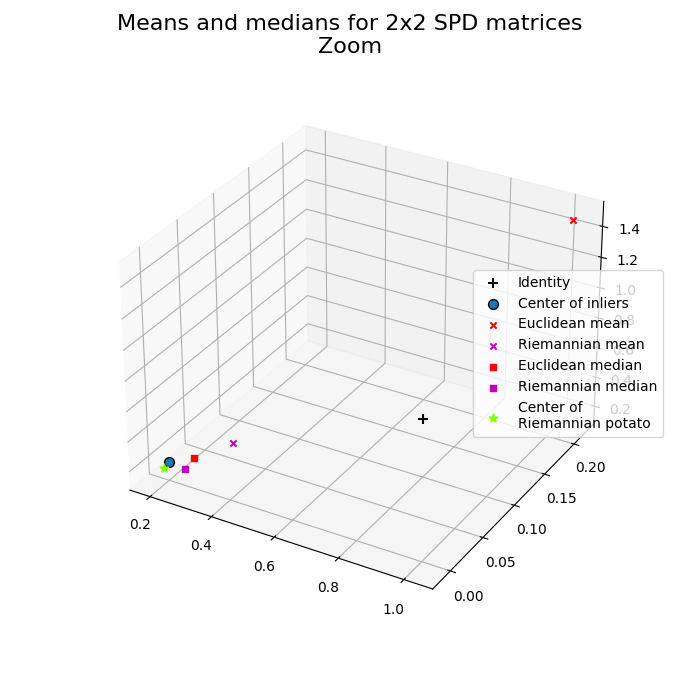
Photo finish¶
Specific zoom on means and medians.
Surprise guest: Riemannian potato is fitted with an offline iterative outlier removal, providing a robust mean [4].
C_rp = Potato(metric="riemann", threshold=1.5).fit(X).covmean_
fig3 = plt.figure(figsize=(7, 7))
fig3.suptitle("Means and medians for 2x2 SPD matrices\nZoom", fontsize=16)
ax3 = plt.subplot(111, projection="3d")
ax3.scatter(1, 0, 1, c="k", marker="+", s=50, label="Identity")
ax3.scatter(Cin[0, 0], Cin[0, 1], Cin[1, 1], c="C0", edgecolors="k", s=50,
label="Center of inliers")
ax3.scatter(C_emean[0, 0], C_emean[0, 1], C_emean[1, 1], c="r", marker="x",
label="Euclidean mean")
ax3.scatter(C_rmean[0, 0], C_rmean[0, 1], C_rmean[1, 1], c="m", marker="x",
label="Riemannian mean")
ax3.scatter(C_emed[0, 0], C_emed[0, 1], C_emed[1, 1], c="r", marker="s",
label="Euclidean median")
ax3.scatter(C_rmed[0, 0], C_rmed[0, 1], C_rmed[1, 1], c="m", marker="s",
label="Riemannian median")
ax3.scatter(C_rp[0, 0], C_rp[0, 1], C_rp[1, 1], c="chartreuse", marker="*",
s=40, label="Center of\nRiemannian potato")
ax3.legend(loc="center left", bbox_to_anchor=(0.7, 0.5))
plt.show()
References¶
Total running time of the script: (0 minutes 0.405 seconds)