pyriemann.estimation.Covariances¶
- class pyriemann.estimation.Covariances(estimator='scm', **kwds)[source]¶
Estimation of covariance matrices.
Perform a simple covariance matrix estimation for each given input.
- Parameters:
- estimatorstring, default=”scm”
Covariance matrix estimator, see
pyriemann.geometry.covariance.covariances().- **kwdsdict
Any further parameters are passed directly to the covariance estimator.
See also
- fit(X, y=None)[source]¶
Fit.
Do nothing. For compatibility purpose.
- Parameters:
- Xndarray, shape (n_matrices, n_channels, n_times)
Multi-channel time-series.
- yNone
Not used, here for compatibility with sklearn API.
- Returns:
- selfCovariances instance
The Covariances instance.
- fit_transform(X, y=None)[source]¶
Fit and transform in a single function.
- Parameters:
- Xndarray, shape (n_matrices, n_channels, n_times)
Multi-channel time-series.
- yNone
Not used, here for compatibility with sklearn API.
- Returns:
- X_newndarray, shape (n_matrices, n_channels, n_channels)
Covariance matrices.
- get_metadata_routing()¶
Get metadata routing of this object.
Please check User Guide on how the routing mechanism works.
- Returns:
- routingMetadataRequest
A
MetadataRequestencapsulating routing information.
- get_params(deep=True)¶
Get parameters for this estimator.
- Parameters:
- deepbool, default=True
If True, will return the parameters for this estimator and contained subobjects that are estimators.
- Returns:
- paramsdict
Parameter names mapped to their values.
- set_output(*, transform=None)¶
Set output container.
Refer to the user guide for more details and Introducing the set_output API for an example on how to use the API.
- Parameters:
- transform{“default”, “pandas”, “polars”}, default=None
Configure output of transform and fit_transform.
“default”: Default output format of a transformer
“pandas”: DataFrame output
“polars”: Polars output
None: Transform configuration is unchanged
Added in version 1.4: “polars” option was added.
- Returns:
- selfestimator instance
Estimator instance.
- set_params(**params)¶
Set the parameters of this estimator.
The method works on simple estimators as well as on nested objects (such as
Pipeline). The latter have parameters of the form<component>__<parameter>so that it’s possible to update each component of a nested object.- Parameters:
- **paramsdict
Estimator parameters.
- Returns:
- selfestimator instance
Estimator instance.
Examples using pyriemann.estimation.Covariances¶
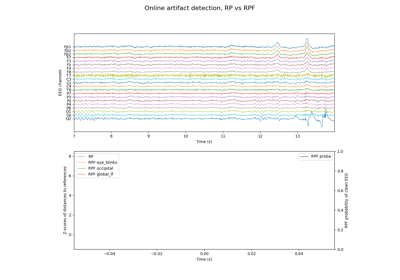
Online Artifact Detection with Riemannian Potato Field
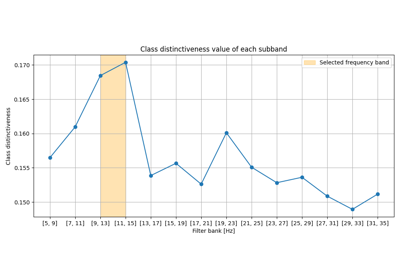
Frequency band selection on the manifold for motor imagery classification
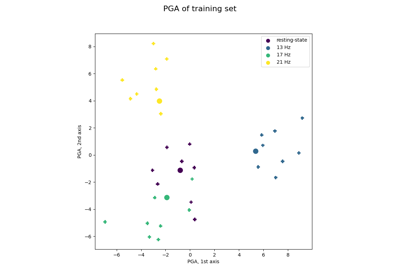
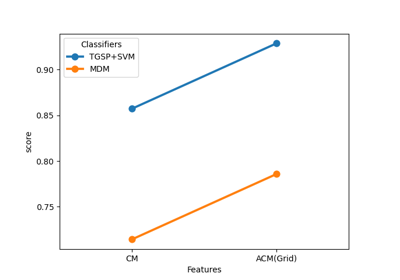
Visualization of SSVEP-based BCI Classification in Tangent Space

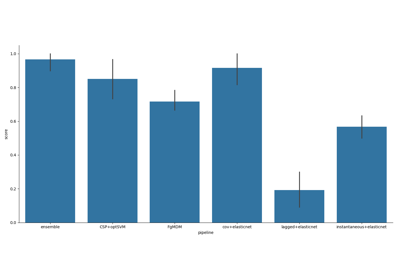
Classify fNIRS data with block diagonal matrices for HbO and HbR

Segmentation of hyperspectral image with Riemannian geometry

Segmentation of SAR image with Riemannian geometry